


今回はメカリレーについてのお話です。メカリレーとは、メカニカルリレーの略です。ちなみに、メカリレーと聞いてパッと物は思い浮かべられますか??
正解はこんなのですね。↓↓
中に電磁石とスイッチング用の金属板が入っています。スイッチングされる原理は、まず切り替えをコントロールする端子に電気が流れ、電磁石に電気が流れます。電磁石ですから、電気が流れると磁石のように振舞いますので、金属板が電磁石に引き寄せられます。その結果、物理的にスイッチングする。という仕組みです。
※詳しい仕組みや動作原理は後ほどご紹介します。
電気的なスイッチングというと、ほかにもトランジスタやFET、フォトカプラなどがありますよね?ただ、そのなかでも物理的にスイッチングするのはこのメカリレーくらいなものです。
接点が実際に動いてスイッチングするのが、有接点リレー、接点が動かないのが無接点リレーです。
当然メカリレーは、有接点リレーですね。接点が動作しますので。
メカリレーの最大の特徴は、物理的に接点を動かしてスイッチングしているために、物理的に導通を切ることが可能です。ただし、物理的に動作させているためにデメリットにもなります。
具体的には、金属板が動く時間がそのまま遅れにつながります。
イメージとしては、スイッチングして!と指令をしてから、一拍遅れる感じです。その遅れる時間について今回実測してみました。
メカリレーの遅れがどれくらいなのか?について理解できる。
Youtubeチャンネルにさまざまな動画を上げています。
↓↓↓こちらからYoutubeチャンネルにアクセス!! ↓↓↓
本ブログはアフィリエイトを用いた広告を掲載しています。
メカリレー(有接点リレー)の作動原理をおさらい
まずは、おさらいです。もちろんあなたも理解しているとは思いますが、念のため復習をしましょう。 メカニカルリレーの構造と動作原理は、オムロンさんの図解が非常にわかりやすいです。

このように、ピンク色の接点部と、青色のコイル部に分かれており、まず、コイル部に電気が流れると電磁石になるのでコイル部の上にある鉄の板が寄せられる。
鉄の板が引き寄せられると、ヒンジを支点として、接点の板を隣の接点に押し付けます。そうすると、接点同士が接触するので、接点同士が通電。つまり電気が通るようになる。という仕組みです。
重要なのは、コイル部に電気を流した量に対して、接点に流せる電気の量は関係ないというところです。
物理的にコイル部と、接点部はつながっていませんから、小さい電流値でコイル部をONして、接点部に大電流を流せます。制御分はコイル部をONできるだけの電力のみあればよく、その先の駆動部は別電源の大容量電力で動作させられるというわけです。
これは特にハード的に多くの電流が流せない場合に活躍します。例えば、コイルに電流を流して鉄の板は動かせるが、その10倍も100倍も大きな電流を制御しないといけない…という時です。例えば電熱線やモーターなどですね。
単純にONOFFだけの制御ができればいい。それから、メカリレーの遅延が気にならない環境であれば、とても使いやすいのがメカリレーです。
メカリレーの弱点とは?3つご紹介。
メカリレーには弱点大きいもので3つ存在します。
それがこの3つです。
無接点リレーに比べて動作までのラグが長い。
無接点リレーとは、例えば、フォトカプラのように、絶縁した状態でICの中でライトをONすると、受け側がそれを感知してスイッチングします。
この場合、どこにも物理的に動くところがありません。発光側でLEDが発光して、その光を受光部で受光したらスイッチングされるわけです。光った瞬間スイッチングするため、とても高速にスイッチングすることが可能です。無接点リレーのスイッチングは高速である。と言って間違いありません。
それに比べて、有接点のメカリレーは、先ほどの動作原理の通り、電磁石の力で鉄の板を引っ張ってから、接点を物理的に接触させています。これはだいぶ時間のロスなんです。
この時間のロスについて今回の記事では具体的なタイムをだそう。という目的になっています。
ON/OFFの切り替えがカチャカチャうるさい。
工場などの比較的周りの音が大きく、騒がしい現場ではほとんど気になりませんが、静かなところでリレーが動くと、結構響きます。
「カチャ」といい音します。最初はスイッチングできているのが音でわかっていいじゃん。と思いますが、そのうちイライラしてきますのでご安心を。
接点が劣化して最終的に使えなくなる。
有接点リレーは、何度も言いますが接点が物理的に動いてスイッチングを行います。
つまり、どんなに品質が上がって耐久性が上がったとしても、物理的に動かしている以上、接点は摩耗したり、ゴミが付着したり、変形したりなどいろいろな問題が発生します。
有接点リレーは、部品の耐久性という面で無接点リレーには遠く及びません。
ただ、最初から耐久性が低いことを考慮して、メカリレーをカセット型にして、壊れたら差し替えるだけで復旧できるように対策されているものもあります。
装置の故障中に生産が止まってしまう、いわゆるダウンタイムと呼ばれる時間を最小限にするというコンセプトというわけです。
イメージとしてはこんなのです。
壊れる前提で取り換える手間を減らす。ある意味では一つの正解な気もします。
メカリレーの動作時間をオシロスコープで見てみる
それではここからが本題です。メカリレーの弱点として、物理的に接点を動かしている関係で、
ON/OFFのきりかえに時間がかかる(ラグが発生する)とお話しました。
その切り替えに時間はどれくらい必要なのか?許容できるレベルなのか?許容できないレベルなのか?これは皆さん気になりますよね?
そもそもですが…シビアな制御が求められている場合は、メカリレーなんて使ってはいけません。フォトカプラやFETあたりの無接点の応答性の良いスイッチングICを使うべきです。ON/OFFの切り替え時間を正確に予想することが不可能だからです。メカリレーも若干の個体差がありますから、リレーを交換した時に微妙にタイミングがずれて事故が発生するということさえ考えられるのです。
一番微妙なのが、製造現場でそこまでシビアでもないけど、タイミングによっては事故るから早いほうが良いのは間違いない…なんて場面ですね。その場合は、この記事の結果は参考になるかもしれません。
今回検証に使用したもの
今回検証に使用したのは、以下の4点です。
| 名称 | 役割 | Amazonのリンク |
|---|---|---|
| メカリレー | DC5V駆動のメカリレー | Amazonの商品リンク |
| Arduino UNO R4 | メカリレーをON/OFFする | Amazonの商品リンク |
| 配線まわり | メカリレーとArduinoをつなげる | Amazonの商品リンク |
| オシロスコープ | Arduinoの制御信号とメカリレーの動作タイミングを見る | Amazonの商品リンク |
メカリレー
今回の主役です。メカリレーとAmazonで調べてもらうと、これと同じような姿形のメカリレーがとんでもない量でヒットします。
基本機能は全く同じで、スペックも同じなので、中国のどこかで大量生産されているのでしょう…先ほどもお伝えしたように、メカリレーは正確なタイミングを取るための道具としては使えないので、あくまで品質を考えた時には、ON/OFFができるか?くらいでいいと思っています…
Arduino UNO R4
メカリレー単体で検証しても良かったのですが、せっかくならスマートにやりたかったのでArduinoを使います。
Arduinoはただメカリレーへのトリガーを入れるためだけなので、ArduinoシリーズであればなんでもOKです。今回は手元に合った新しいArduinoということで、Arduino UNO R4を選んでみました。
配線周り
Arduinoとメカリレーを用意したところで、それらをつなげるために配線関係の部品が必要になります。
一番わかりやすいのが、ブレッドボードとジャンパーワイヤーです。Arduinoや電子工作でプロトタイプの製作をするための環境がある場合はすでにお持ちの場合がほとんどだと思います。
オシロスコープ
オシロスコープは、正確にメカリレーの遅れ時間を確認するのに必要です。しかも、Arduinoからの制御指令を基準としてメカリレーの接点が通じるまで、どれくらい時間がずれるか?を見ます。
ですから、1CHではメカリレーのON/OFF切り替えを監視して、もう1CHではArduinoからメカリレーに流したタイミングを監視する必要があります。となると、1CHしか見れないような激安オシロスコープではCH数が足りないということがわかってもらえるはずです。今回は最低でも2CHは必要です。
後ほどつなぎ方はご覧いただきますが、文字で説明すると、1CHはArduinoとメカリレーがつながっているdigitalPinへ。もう一つのCHは、メカリレーの接点部分です。
そうすることで、1台のオシロスコープでズレを数値化することが可能ということです。
わたしは仕事の関係で職場では4CHでごっついオシロスコープを使用していますが、家ではそんなにごついのは不要です。
なので、2CHでしかも充電式のハンディのオシロスコープにしました。これ結構便利ですよ!コンセントが不要ですからね。それに軽いので持ち運びも余裕です。
検証方法:Arduinoで指令を出して、オシロスコープで確認。
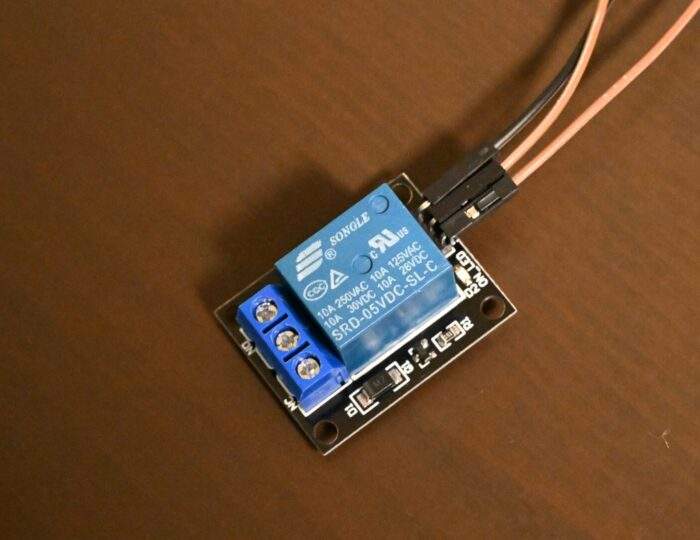
それでは検証方法をご説明します。まずはこのように接続します。

オシロスコープは、Arduinoからの7番ピンが検知できるようなところに1CH、メカリレーが反応したことがわかるようなところに1CHつなげます。
すると、Arduinoの7番ピンのONしたタイミングから、メカリレーがONになるタイミング。つまりメカリレーで遅れる時間がわかる。ということです。
それでは次に、Arduinoにこのようなスケッチ(コード)を書き込みます。単純に7番ピンを出力ピンに設定して、LEDをチカチカさせる、通称Lチカと同じようなコードです。
メカリレーにはDC5VとGNDをつなげて、3本目にはArduinoのIOの7番ピンをつなげていますが、
この状態で7番ピンをON/OFFするだけでリレーは動作します。
void setup() {
// put your setup code here, to run once:
pinMode(7,OUTPUT);
}
void loop() {
// put your main code here, to run repeatedly:
digitalWrite(7,HIGH);
delay(1000);
digitalWrite(7,LOW);
delay(1000);
}最後にオシロスコープの結果を確認します。
検証結果:信号が出てから約4mSec遅れて立ち上がる。
検証結果(オシロスコープの波形)はこちらです。1マスが1mSecです。
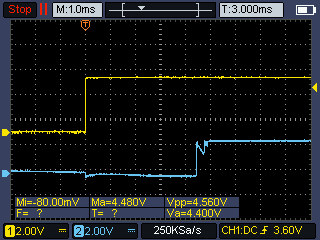
黄色い波形がArduinoの7番ピンの電圧。水色がメカリレーの先につながっているLEDの電圧です。
ご覧いただくとわかる通り、黄色い波形が立ち上がってから、4.5マス程度遅れて水色が立ち上がっていますね。先ほどお伝えしたようにこのオシロのグラフは1マス1mSecで設定していますから、メカリレーが4.5mSec遅れて反応していると言えます。
言い換えると、Arduinoの7番ピンがONになってから、4.5mSec遅れてメカリレーがONになる。ということです。
4.5mSecというと、人間では検知できないですが、必ずこのロスが発生すると考えると、あまり小さい遅れとは言えないです。
検証結果2:メカリレーの立ち上がりに注目
メカリレーが、Arduinoの指令から4.5mSec遅れるというのは既にお伝えした通りです。
ただ、この検証から他にもわかることがあります。もう一度水色(メカリレー)の波形をご覧ください。

何か不自然なのがお分かりいただけますか?一度HIGHになった直後、少し電圧が下がっているのが確認できますよね?1マスが1mSecですから、0.4mSecほどでしょうか。
これは、メカリレーの中で、板がバウンドしてチャタリングというものを起こしているためです。
チャタリングは、なかなか厄介な問題で、本来はON/OFFをスパッと1発で切り替えたいのに、意図せずON/OFFを繰り返してしまったりする現象です。
この場合だと、1回ONになってから、0.4mSec後に立下り、その直後にまた立ち上がっています。
もしセンサーで立ち上がりを見ている場合、2回立ち上がっているように見えてしまいます。
チャタリングを防止するためには、メカ的に回路を修正したり、ソフト的に不感時間と呼ばれる
チャタリングが発生する時間はIN側を見ない。というやり方もあります。
どちらにしても、修正が必要となってしまうため、あまりこのチャタリングが発生すること自体、
うれしいことではありません。
今回のまとめ:メカリレーは反応するまでそこそこ時間がかかる。
今回のまとめです。メカリレーは物理的な接点を有する、有接点リレーに分類されます。有接点リレーは、物理的に動作するパーツがあるため、無接点リレーに比べて、ON/OFFの切り替えに時間がかかります。
Arduino用の電子工作のキットによく入っている、メカリレーを使って検証した結果、メカリレーにONするような信号を入れてから、約4.5mSec後に通電してリレーがONになりました。ただしこの結果は自分の手元にあったメカリレーを使って得られた実験値であり、すべてのメカリレーがこの結果と同じになるとは言えないことに注意。
他にも、ON/OFFした時に物理的に接点が跳ねる、いわゆるチャタリングが発生していることもわかりました。
物理的に電気の流れをON/OFFできるメカリレーですが、構造が単純で、大電流のスイッチングも比較的得意です。メカリレーの特性をよく理解したうえで、得意・不得意をうまく使いこなしてください。


